混凝土泵車智能臂架規(guī)劃算法建模及仿真試驗研究


發(fā)布日期:2017-05-19 來源:中國混凝土網(wǎng) 作者:張濤 胡送橋 譚海波 曾啟
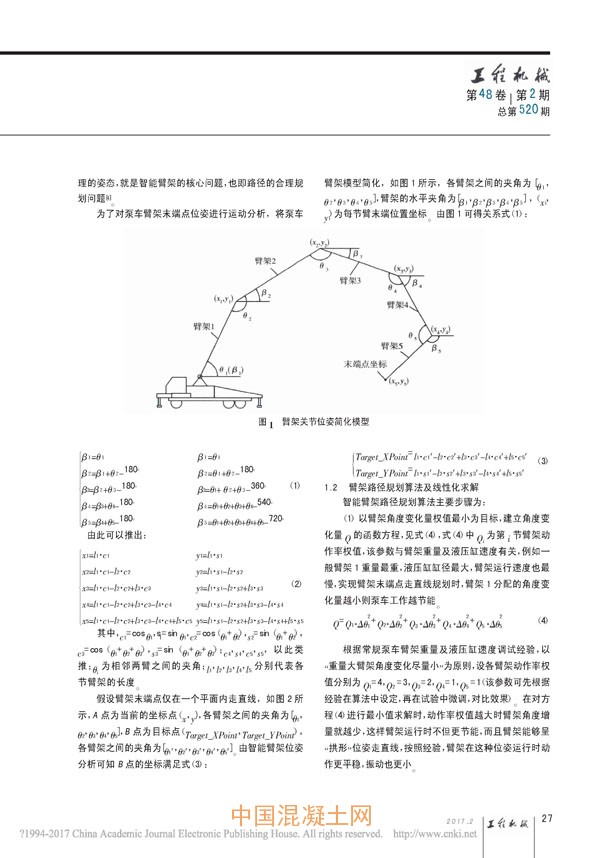
核心提示:提出一種以混凝土泵車臂架角度變化量權(quán)值最小為目標的智能臂架規(guī)劃算法�,即通過線性化處理直接精確求解出智能臂架每一步規(guī)劃的臂架末端坐標位置��。建立ADAMS 臂架動力學(xué)模型��、Matlab\Simulink 控制算法模型��,通過仿真平臺實現(xiàn)液壓缸速度���、臂架角度及臂架末端坐標數(shù)據(jù)的交互仿真,驗證規(guī)劃算法控制臂架末端軌跡規(guī)劃走直線的效果。同時研究了智能臂架控制器原理��,即根據(jù)臂架遙控器軌跡路徑控制指令��,控制器規(guī)劃算法模塊優(yōu)化出臂架最佳角度���,通過液壓缸連桿執(zhí)行機構(gòu)動作實現(xiàn)臂架角度增量變化��,并實時反饋臂架傾角及補償末端坐標偏
[ 技術(shù)搜索 ]
[ 加入收藏 ]
[ 告訴好友 ]
[ 打印本文 ]
[ 違規(guī)舉報 ]
[ 關(guān)閉窗口 ]