混凝土泵車臂架變形補償和軌跡控制技術研究


發布日期:2016-07-11 來源:中國混凝土網 作者:夏繼軍 郭崗 趙鑫
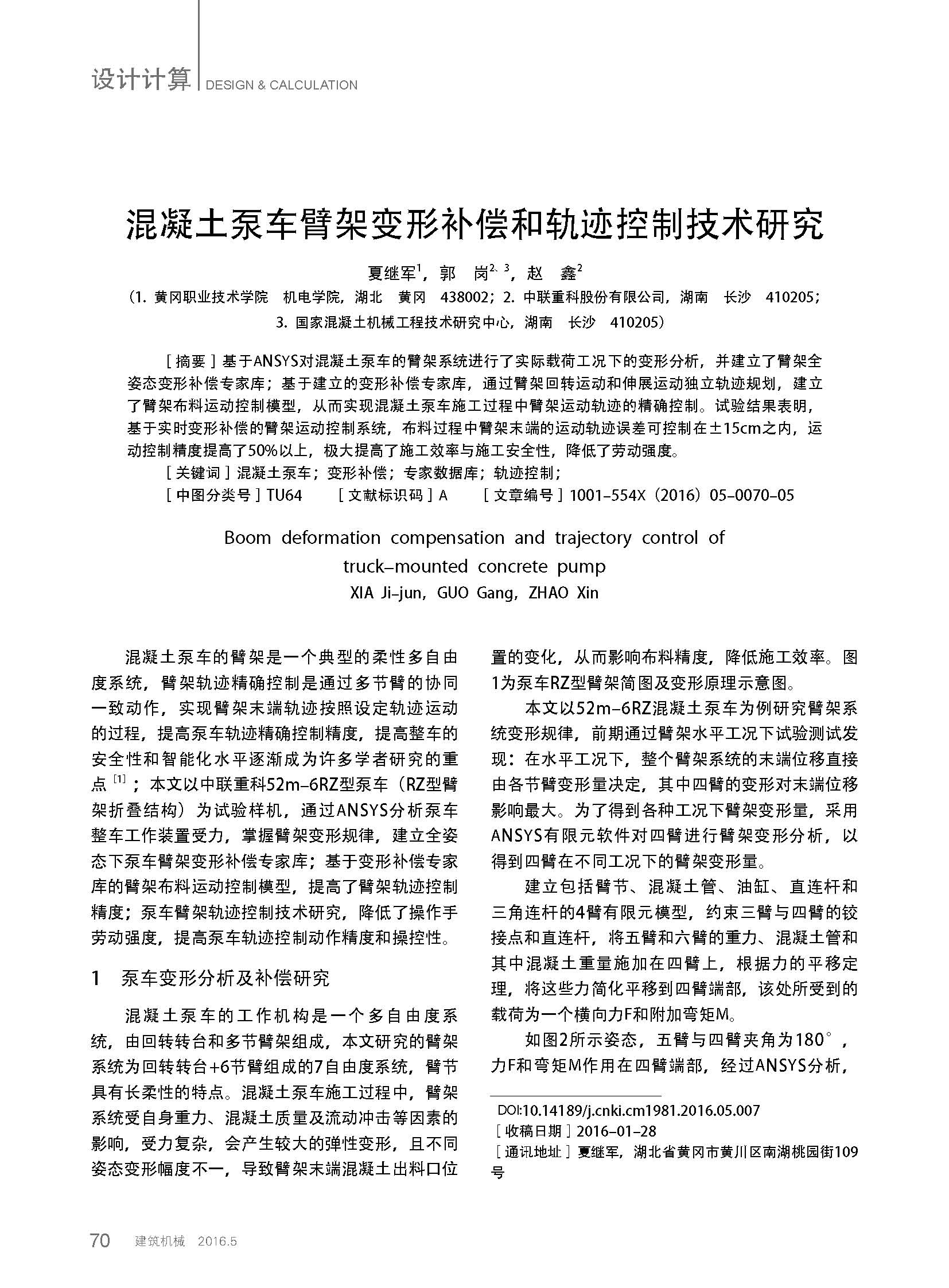
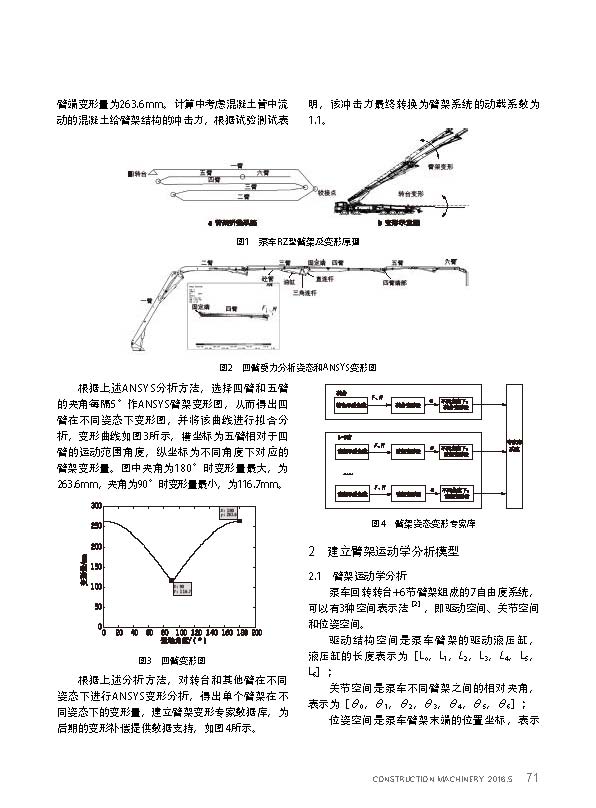
核心提示:基于ANSYS對混凝土泵車的臂架系統進行了實際載荷工況下的變形分析,并建立了臂架全姿態變形補償專家庫;基于建立的變形補償專家庫,通過臂架回轉運動和伸展運動獨立軌跡規劃,建立了臂架布料運動控制模型,從而實現混凝土泵車施工過程中臂架運動軌跡的精確控制.試驗結果表明,基于實時變形補償的臂架運動控制系統,布料過程中臂架末端的運動軌跡誤差可控制在±15cm之內,運動控制精度提高了50%以上,極大提高了施工效率與施工安全性,降低了勞動強度.
[ 技術搜索 ]
[ 加入收藏 ]
[ 告訴好友 ]
[ 打印本文 ]
[ 違規舉報 ]
[ 關閉窗口 ]